Digital Control of High-Frequency Switched-Mode Power Conver pdf epub mobi txt 电子书 下载 2026
- power
- digital
- 电力电子
- 开关电源
- 数字控制
- 高频变换
- 控制系统
- 电力转换
- 稳态分析
- 动态分析
- 建模与仿真
- 优化控制

具体描述
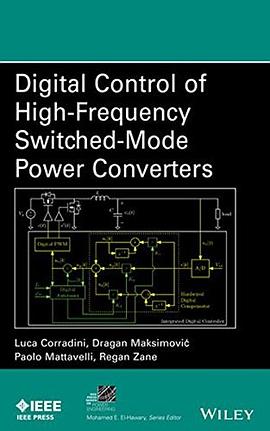
作者简介
Luca Corradini, PhD, is an Assistant Professor at the University of Padova, Italy. He is the co-author of more than fifty articles published in journals and conference proceedings.
Dragan Maksimovic, PhD is a Charles V. Schelke Endowed Professor and Director of the Colorado Power Electronics Center (CoPEC) at the University of Colorado at Boulder, USA.
Paolo Mattavelli, PhD, joined the DTG of the University of Padova, Italy. Dr. Mattavelli's major fields of interest include analysis, and modeling and control of power converters.
Regan Zane, PhD, is a Professor of Electrical and Computer Engineering at the University of Colorado at Boulder, USA. Dr. Zane received the NSF Career Award in 2004 for his work in energy efficient lighting systems.
目录信息
INTRODUCTION 1
CHAPTER 1 CONTINUOUS-TIME AVERAGED MODELING OF DC–DC CONVERTERS 13
1.1 Pulse Width Modulated Converters 14
1.2 Converters in Steady State 16
1.2.1 Boost Converter Example 17
1.2.2 Estimation of the Switching Ripple 19
1.2.3 Voltage Conversion Ratios of Basic Converters 20
1.3 Converter Dynamics and Control 21
1.3.1 Converter Averaging and Linearization 22
1.3.2 Modeling of the Pulse Width Modulator 24
1.3.3 The System Loop Gain 25
1.3.4 Averaged Small-Signal Models of Basic Converters 26
1.4 State-Space Averaging 28
1.4.1 Converter Steady-State Operating Point 28
1.4.2 Averaged Small-Signal State-Space Model 29
1.4.3 Boost Converter Example 30
1.5 Design Examples 32
1.5.1 Voltage-Mode Control of a Synchronous Buck Converter 32
1.5.2 Average Current-Mode Control of a Boost Converter 42
1.6 Duty Ratio d[k] Versus d(t) 48
1.7 Summary of Key Points 50
CHAPTER 2 THE DIGITAL CONTROL LOOP 51
2.1 Case Study: Digital Voltage-Mode Control 52
2.2 A/D Conversion 53
2.2.1 Sampling Rate 53
2.2.2 Amplitude Quantization 56
2.3 The Digital Compensator 58
2.4 Digital Pulse Width Modulation 63
2.5 Loop Delays 65
2.5.1 Control Delays 65
2.5.2 Modulation Delay 66
2.5.3 Total Loop Delay 70
2.6 Use of Averaged Models in Digital Control Design 71
2.6.1 Limitations of Averaged Modeling 71
2.6.2 Averaged Modeling of a Digitally Controlled Converter 74
2.7 Summary of Key Points 78
CHAPTER 3 DISCRETE-TIME MODELING 79
3.1 Discrete-Time Small-Signal Modeling 80
3.1.1 A Preliminary Example: A Switched Inductor 82
3.1.2 The General Case 85
3.1.3 Discrete-Time Models for Basic Types of PWM Modulation 87
3.2 Discrete-Time Modeling Examples 88
3.2.1 Synchronous Buck Converter 90
3.2.2 Boost Converter 97
3.3 Discrete-Time Modeling of Time-Invariant Topologies 102
3.3.1 Equivalence to Discrete-Time Modeling 106
3.3.2 Relationship with the Modified Z-Transform 108
3.3.3 Calculation of Tu(z) 108
3.3.4 Buck Converter Example Revisited 112
3.4 Matlab® Discrete-Time Modeling of Basic Converters 112
3.5 Summary of Key Points 117
CHAPTER 4 DIGITAL CONTROL 119
4.1 System-Level Compensator Design 119
4.1.1 Direct-Digital Design Using the Bilinear Transform Method 120
4.1.2 Digital PID Compensators in the z- and the p-Domains 123
4.2 Design Examples 126
4.2.1 Digital Voltage-Mode Control of a Synchronous Buck Converter 126
4.2.2 Digital Current-Mode Control of a Boost Converter 134
4.2.3 Multiloop Control of a Synchronous Buck Converter 136
4.2.4 Boost Power Factor Corrector 141
4.3 Other Converter Transfer Functions 154
4.4 Actuator Saturation and Integral Anti-Windup Provisions 160
4.5 Summary of Key Points 165
CHAPTER 5 AMPLITUDE QUANTIZATION 167
5.1 System Quantizations 167
5.1.1 A/D Converter 167
5.1.2 DPWM Quantization 169
5.2 Steady-State Solution 172
5.3 No-Limit-Cycling Conditions 175
5.3.1 DPWM versus A/D Resolution 175
5.3.2 Integral Gain 178
5.3.3 Dynamic Quantization Effects 181
5.4 DPWM and A/D Implementation Techniques 182
5.4.1 DPWM Hardware Implementation Techniques 182
5.4.2 Effective DPWM Resolution Improvements via ΣΔ Modulation 186
5.4.3 A/D Converters 187
5.5 Summary of Key Points 190
CHAPTER 6 COMPENSATOR IMPLEMENTATION 191
6.1 PID Compensator Realizations 194
6.2 Coefficient Scaling and Quantization 197
6.2.1 Coefficients Scaling 198
6.2.2 Coefficients Quantization 200
6.3 Voltage-Mode Control Example: Coefficients Quantization 203
6.3.1 Parallel Structure 204
6.3.2 Direct Structure 206
6.3.3 Cascade Structure 208
6.4 Fixed-Point Controller Implementation 213
6.4.1 Effective Dynamic Range and Hardware Dynamic Range 214
6.4.2 Upper Bound of a Signal and the L1-Norm 216
6.5 Voltage-Mode Converter Example: Fixed-Point Implementation 218
6.5.1 Parallel Realization 220
6.5.2 Direct Realization 225
6.5.3 Cascade Realization 229
6.5.4 Linear versus Quantized System Response 233
6.6 HDL Implementation of the Controller 234
6.6.1 VHDL Example 235
6.6.2 Verilog Example 237
6.7 Summary of Key Points 239
CHAPTER 7 DIGITAL AUTOTUNING 241
7.1 Introduction to Digital Autotuning 242
7.2 Programmable PID Structures 243
7.3 Autotuning VIA Injection of a Digital Perturbation 247
7.3.1 Theory of Operation 249
7.3.2 Implementation of a PD Autotuner 253
7.3.3 Simulation Example 255
7.3.4 Small-Signal Analysis of the PD Autotuning Loop 261
7.4 Digital Autotuning Based on Relay Feedback 265
7.4.1 Theory of Operation 266
7.4.2 Implementation of a Digital Relay Feedback Autotuner 267
7.4.3 Simulation Example 271
7.5 Implementation Issues 272
7.6 Summary of Key Points 275
APPENDIX A DISCRETE-TIME LINEAR SYSTEMS AND THE Z-TRANSFORM 277
A.1 Difference Equations 277
A.1.1 Forced Response 278
A.1.2 Free Response 279
A.1.3 Impulse Response and System Modes 281
A.1.4 Asymptotic Behavior of the Modes 282
A.1.5 Further Examples 283
A.2 Z-Transform 284
A.2.1 Definition 284
A.2.2 Properties 285
A.3 The Transfer Function 287
A.3.1 Stability 287
A.3.2 Frequency Response 288
A.4 State-Space Representation 288
APPENDIX B FIXED-POINT ARITHMETIC AND HDL CODING 291
B.1 Rounding Operation and Round-Off Error 291
B.2 Floating-Point versus Fixed-Point Arithmetic Systems 293
B.3 Binary Two’s Complement (B2C) Fixed-Point Representation 294
B.4 Signal Notation 296
B.5 Manipulation of B2C Quantities and HDL Examples 297
B.5.1 Sign Extension 298
B.5.2 Alignment 299
B.5.3 Sign Reversal 301
B.5.4 LSB and MSB Truncation 302
B.5.5 Addition and Subtraction 304
B.5.6 Multiplication 305
B.5.7 Overflow Detection and Saturated Arithmetic 307
APPENDIX C SMALL-SIGNAL PHASE LAG OF UNIFORMLY SAMPLED PULSE WIDTH MODULATORS 313
C.1 Trailing-Edge Modulators 313
C.2 Leading-Edge Modulators 317
C.3 Symmetrical Modulators 318
REFERENCES 321
INDEX 335
· · · · · · (收起)
读后感
评分
评分
评分
评分
用户评价
我必须承认,这本书的阅读过程并非一帆风顺,它要求读者对电力电子和控制理论都有一定的预备知识,但正因为这种要求,使得它避开了许多初级读物中常见的肤浅描述,直击问题的核心。最让我感到惊喜的是,书中对数字控制系统在特定应用场景下的局限性进行了坦诚的讨论,例如在处理极低电压或电流纹波要求极其苛刻的场合,数字系统如何通过超高速采样和复杂的算法来逼近甚至超越模拟控制的性能极限。作者并没有把数字控制描绘成万能的“银弹”,而是客观地分析了它在采样延迟、量化噪声以及计算资源消耗方面的固有挑战,并提出了切实可行的缓解措施。这种实事求是的态度,让我对书中的每一个结论都充满了信任感。读完此书,我感觉自己不仅学会了如何设计数字控制环路,更重要的是,我对未来高频电源设计的技术瓶颈和潜在突破口有了更清晰的认识和更成熟的判断力。
评分老实说,这本书的深度和广度,足以让那些在电源设计领域摸爬滚打了多年的资深工程师也忍不住细细品味。我特别欣赏作者在处理非线性系统建模和鲁棒性设计时所展现出的老辣功力。面对高频、高密度电源日益严苛的瞬态性能要求,传统的模拟控制往往显得力不从心,而本书对如何利用先进的数字算法来克服这些挑战,提供了非常前沿和实用的思路。书中对状态空间平均法在数字域的转化、以及如何利用观测器(如卡尔曼滤波)来提高状态估计精度,这些高级话题的阐述,逻辑链条异常清晰,让人在阅读时能产生强烈的“茅塞顿开”之感。特别是关于如何应对器件参数漂移和外部干扰的章节,作者没有止步于理论推导,而是引入了自适应控制和基于模型的预测控制(MPC)的讨论,这表明本书的视野完全站在了当前电力电子控制技术的前沿,为行业内的创新提供了坚实的理论基础和可行的技术路径。
评分对于我这个偏向软件和算法背景的工程师来说,这本书最吸引我的地方在于它对数字实现细节的“毫不留情”的细致描述。很多电源控制的书籍在讲到微控制器(MCU)或DSP时,往往一带而过,但本书却花了大量篇幅讨论了定点运算的精度问题、中断服务程序的延迟对控制回路性能的影响,乃至如何优化代码结构以确保控制周期的准确性。作者似乎非常清楚,在实际的嵌入式系统中,理论上的完美设计可能因为硬件资源限制或时序约束而功亏一篑。他甚至提到了如何利用硬件加速器来分担部分计算任务,这对于追求极致效率的数字电源设计师来说,无疑是极具价值的工程见解。阅读这些章节时,我仿佛能听到作者在耳边提醒:“别忘了,代码跑在物理世界里,时序和精度都是钱和性能的度量衡。”这种深入一线的视角,极大地提升了这本书的实用价值。
评分这本书的结构布局非常巧妙,它没有一味地追求技术的前沿性,而是构建了一个非常扎实的知识阶梯。前几章奠定了扎实的开关电源拓扑基础和离散化理论,中段则重点讲解了针对不同拓扑(如Buck、Boost、全桥等)的数字环路设计与补偿器调优,最后几章则开始探索更高阶的控制策略和系统集成问题。这种由浅入深的组织方式,使得读者可以根据自己的知识储备选择切入点,但最终都能导向对全系统数字控制的深刻理解。尤其值得称赞的是,书中在讲解某一控制策略时,总是会同时对比它与传统模拟控制的优劣,这种对比分析的视角,使得读者能清晰地认识到“为什么要用数字控制”,而不是仅仅停留在“如何实现数字控制”的层面。这种对“为什么”的深入探究,是任何一本优秀的技术专著所不可或缺的灵魂。
评分这本关于高频开关电源数字控制的书籍,对于我这样一个刚接触这个领域的新手来说,简直是打开了一扇新世界的大门。它不像很多教科书那样冷冰冰地堆砌公式,而是真正地将理论与实践紧密结合起来。作者在介绍基础概念时,无论是脉冲宽度调制(PWM)的原理,还是反馈回路的设计,都讲解得极其透彻,让我能快速建立起对数字控制在开关电源中应用的宏观认知。更让我印象深刻的是,书中对采样、量化以及如何选择合适的数字控制器(如PID)的深入探讨。例如,在处理高频开关带来的快速动态响应问题时,书中提供的几种数字滤波器设计方法,不仅有清晰的数学推导,更有直观的仿真结果佐证其有效性,这对于我理解数字环路带宽与系统稳定裕度之间的微妙平衡至关重要。我感觉作者非常注重工程实现层面的细节,很多看似微不足道但实际操作中容易出错的地方,都被提前指明并给出了规避策略,这极大地加速了我的学习进程,让我少走了不少弯路。
评分 评分 评分 评分 评分相关图书










本站所有内容均为互联网搜索引擎提供的公开搜索信息,本站不存储任何数据与内容,任何内容与数据均与本站无关,如有需要请联系相关搜索引擎包括但不限于百度,google,bing,sogou 等
© 2026 book.quotespace.org All Rights Reserved. 小美书屋 版权所有