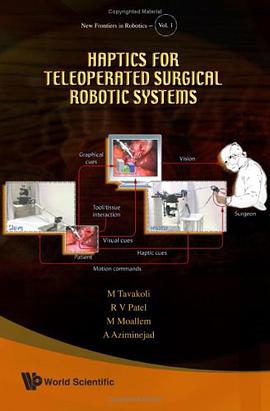
Haptics for Teleoperated Surgical Robotic Systems pdf epub mobi txt 电子书 下载 2026
出版者:
作者:Moallem, M.
出品人:
页数:158
译者:
出版时间:
价格:$ 68.93
装帧:
isbn号码:9789812813152
丛书系列:
图书标签:
- Haptics
- Teleoperation
- Surgical Robotics
- Robotics
- Medical Robotics
- Human-Robot Interaction
- Control Systems
- Mechatronics
- Virtual Reality
- Sensing
下载链接在页面底部

具体描述
机器人辅助微创手术的未来:精准、触觉反馈与人机协作 图书名称: 机器人辅助微创手术的未来:精准、触觉反馈与人机协作 图书简介: 本著作深入探讨了当前机器人辅助微创手术领域的前沿发展、面临的挑战以及未来的发展方向。本书旨在为外科医生、生物医学工程师、机器人专家以及医疗技术研发人员提供一个全面、深入且富有洞察力的视角,以理解和推动下一代手术机器人的发展,最终实现更安全、更精准、更微创的手术操作。 第一部分:微创手术的演进与当前挑战 第一章:微创手术的范式转变与核心需求 本章首先回顾了传统开放手术到腹腔镜手术,再到机器人辅助手术的演变历程。重点分析了微创手术在降低患者创伤、加速康复方面的显著优势。然而,现有的机器人系统在提高操作灵活性和精细度方面仍存在局限性。本章详细阐述了当代手术机器人需要解决的核心问题,包括术中视野的局限性、器械操作的固有刚性,以及最关键的——缺乏有效的术中触觉信息传递。 第二章:现有手术机器人系统的解剖与限制 本章对当前市场上主流的达芬奇(da Vinci)系统及其竞争者进行了细致的结构和功能分析。深入剖析了这些系统的机械臂设计、运动学特性、力控制能力以及用户界面(Console)。重点讨论了当前系统在“远端耦合”(Tele-manipulation)操作中的固有缺点,如缺乏力反馈导致的组织损伤风险,以及手术环境与操作者感知之间的“信息鸿沟”。 第二部分:感知、认知与决策支持系统 第三章:先进术中成像与导航技术 高质量的术中感知是精准手术的基础。本章系统介绍了多模态融合成像技术在机器人手术中的应用,包括三维内窥镜系统(3D Endoscopy)、光学相干断层成像(OCT)、术中超声(Intraoperative Ultrasound)以及荧光引导成像(Fluorescence Guidance)。探讨了如何将这些数据实时整合到手术机器人的控制框架中,以提供增强的解剖结构可视化和病灶边界识别能力。 第四章:人工智能在手术规划与执行中的角色 本章聚焦于人工智能(AI)和机器学习(ML)如何重塑手术流程。内容涵盖术前手术路径的优化规划、基于大数据的术中风险预测模型,以及对术中关键事件的自动识别。详细讨论了AI驱动的“增强现实手术指导”(AR Guidance)系统如何叠加关键信息于实时视频流上,辅助外科医生进行更安全的路径选择和更精确的切割、缝合操作。 第三部分:人机交互与操作精度的飞跃 第五章:下一代操作界面与直觉化控制 本章是关于如何弥合人与机器之间“控制-反馈”鸿沟的核心章节。探讨了新型的、更符合人体工程学的手术台控制站设计,以及如何将高自由度的机械臂运动更好地映射到外科医生的自然手势上。重点分析了“力增强”与“运动滤波”算法在平滑操作、去除人手颤动(Tremor Filtering)中的作用,并讨论了主从控制(Master-Slave Control)架构的最新改进。 第六章:触觉反馈的科学与工程:从概念到实现 本章专注于本领域最关键的瓶颈——触觉反馈。详细介绍了触觉感知的生理学基础,以及如何在手术机器人系统中模拟真实的力-位移关系。内容包括: 力传感器技术: 压电式、应变片式和光纤传感器的应用及其在微米级力检测上的精度。 反馈实现机制: 机械耦合力反馈、振动反馈(Vibrotactile Feedback)以及电皮肤刺激(Electro-Tactile Stimulation)在操作台上的实现方案。 感知建模: 如何将测得的力信号,通过滤波和增益调节,转化为对操作者神经系统的有效刺激,使其能“感受”到组织的硬度、张力和弹性,而不仅仅是视觉反馈。 第四部分:系统集成、自主化与未来展望 第七章:柔性与自适应机器人系统 传统的刚性机器人系统在复杂解剖结构中可能受限。本章探讨了软体机器人(Soft Robotics)和串联弹性驱动器(Series Elastic Actuators, SEA)在手术机器人中的新兴应用。柔性器械能够更好地适应人体内部环境,减少对周围组织的挤压。同时,分析了自适应控制策略如何使机器人能够在组织性质变化时(如出血、水肿)自动调整其运动参数。 第八章:手术机器人系统的安全、伦理与监管 随着机器人系统自主程度的提高,安全性和可信赖性成为重中之重。本章讨论了系统故障诊断、冗余设计以及在紧急情况下的安全撤回机制。此外,还对机器人辅助手术中的伦理问题进行了深入探讨,包括责任界定、数据隐私保护,以及未来完全自主手术的社会接受度问题。 第九章:展望:迈向全自主与远程手术的未来 本章总结了本书探讨的技术前沿,并对未来十年内手术机器人可能达到的水平做出预测。重点展望了高精度远程手术(Telesurgery)在资源匮乏地区的应用潜力,以及结合数字孪生(Digital Twin)技术,实现“术前演练-术中校准-术后评估”闭环的智能手术系统。本书最后强调,人机协作仍是未来手术的核心,目标是创造一个“更具洞察力、更少失误”的手术环境。
作者简介
目录信息
读后感
评分
评分
评分
评分
评分
用户评价
评分
评分
评分
评分
评分
相关图书














本站所有内容均为互联网搜索引擎提供的公开搜索信息,本站不存储任何数据与内容,任何内容与数据均与本站无关,如有需要请联系相关搜索引擎包括但不限于百度,google,bing,sogou 等
© 2026 book.quotespace.org All Rights Reserved. 小美书屋 版权所有