
具体描述
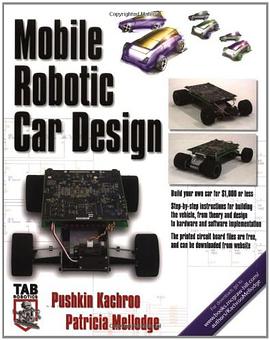
This thoughtful guide gives you complete, illustrated plans and instructions for building a 1:10-scale car robot that would cost thousands of dollars if bought off the shelf. But beyond hours of entertainment and satisfaction spent creating and operating an impressive and fun project, "Mobile Robotic Car Design" provides serious insight into the science and art of robotics. Written by robotics experts, this book gives you a solid background in electrical and mechanical theory, and the design savvy to conceptualize, enlarge, and build robotics projects of your own.In these pages, robot designers Pushkin Kachroo and Patricia Mellodge will help you: build an impressive robot vehicle that can regulate its own speed and direction, for a cost of about $1000; give your robot car the ability to sense and respond to the environment; experiment with automatic cruise control that alters speed to meet conditions; learn what it takes to build a security robot that can patrol actively or passively; grasp the theory and principles behind robot design and operation; learn what makes servos, sensors, motors, and controls work; examine the source code for the PIC microcontroller and the DSP (digital signal processor); find free code for the car's printed circuit board at the companion website; and, get a complete parts list and list of parts suppliers.
作者简介
目录信息
读后感
评分
评分
评分
评分
用户评价
如果说这本书有什么值得称赞的地方,那就是它对“系统集成”的流程化梳理,尽管其深度有限。它确实提供了一个从概念到成品的一个相对完整的、线性的开发流程图景,这对从未做过机器人项目的团队来说,是一个很好的起点,能帮助他们避免一些基础性的流程错误,比如电源线径估算错误、散热设计不足导致的元件烧毁等。然而,这种集成更多地停留在物理层面和基础电子层面。在当今复杂的机器人项目中,系统集成早已超越了硬件的堆叠。它要求软件模块间的无缝对接、数据格式的标准化、以及不同时间尺度控制回路的协同工作。这本书对于“异构系统”的集成挑战,例如如何确保实时操作系统(RTOS)上的关键任务与非实时任务之间的数据一致性,几乎没有涉及。因此,它更像是一份关于如何“把零件装配起来”的说明书,而非指导如何构建一个“高效协同、具备鲁棒性的智能体”的蓝图。
评分初次翻阅此书,给我的感觉是它像一本面向初学者的“动手实践指南”,而非一本深入的理论专著。对于那些刚刚接触机器人制作,甚至连基础的电路知识都有些模糊的人来说,这本书的叙述方式无疑是非常友好的,它用大量详实的图示和步骤,将一个看似复杂的项目拆解得非常易懂。但是,对于已经具备一定工程背景,希望探究设计背后的“为什么”和“如何优化”的工程师来说,这种详尽的“说明书”式的写作风格就显得有些冗余和浅尝辄止了。例如,在谈到电机驱动器选择时,书中只是简单地罗列了不同驱动芯片的参数,却鲜有对PWM占空比对电机扭矩影响的详细数学模型分析,也没有对不同控制回路(如PID的调参技巧)进行深入的探讨。总而言之,它更像一本优秀的入门工具书,而非一本能够指导我解决实际工程难题的进阶手册。
评分读完关于通信与人机交互的部分,我不得不承认,这部分内容显得非常落后且缺乏前瞻性。书中重点介绍的无线通信方案,如早期的蓝牙模块和简易的2.4GHz射频模块,在今天的物联网和远程控制场景中,已经显得力不从心,尤其是在需要高带宽数据传输(如实时视频流回传)和高可靠性指令传输的场合。如今,5G、Wi-Fi Mesh网络以及更稳定的低功耗广域网(LPWAN)技术才是主流。更令人遗憾的是,关于用户体验(UX)设计的讨论几乎为零。一个优秀的移动机器人,除了其内在的控制系统外,其外部的操作界面和反馈机制也至关重要。书中没有提及如何设计直观的遥控器界面,也没有涉及Web界面或移动App作为控制中枢的架构设计。这本书似乎将“人机交互”简化为了“发送指令和接收简单的状态反馈”,这在构建一个现代、用户友好的机器人系统时,是一个巨大的盲点。
评分这本书在对材料科学和结构强度的讨论上,展现出了一种严谨但略显保守的态度。我注意到其中对不同金属和塑料材料的承重能力和抗震性的描述非常详尽,这对于确保小车在复杂地形下不会轻易解体确实很有帮助。然而,这种对“稳固性”的过度强调,似乎牺牲了对“轻量化”和“快速迭代”的关注。在当前强调能效比和敏捷性的移动机器人领域,如何通过拓扑优化设计来减轻载荷,同时保持足够的刚性,是一个至关重要的话题。这本书在这方面着墨不多,似乎更多地倾向于传统的、重量感十足的工业设计理念。我期待能看到更多关于增材制造(3D打印)在快速原型设计中的应用,以及如何利用有限元分析(FEA)来预测结构在动态负载下的疲劳表现。目前的描述,更像是对上世纪末机器人设计范式的复述,缺少了对新材料和新制造工艺的引入。
评分这本《移动机器人小车设计》的书籍,从目录上看,似乎更侧重于机械结构和硬件层面的探讨,对于我这个对算法和控制逻辑更感兴趣的读者来说,或许有些许的失落感。我原本期待能深入了解如何构建一个能够自主导航、避障的智能系统,比如SLAM(即时定位与地图构建)的最新进展,或是各种传感器融合的复杂算法,例如卡尔曼滤波在状态估计中的应用。然而,书中似乎花了大量的篇幅来描述如何选择合适的步进电机、设计底盘的几何布局、以及电源管理系统的搭建。这些固然是机器人小车实现的基础,但对于追求“智能”的现代机器人开发者而言,缺乏对高级控制理论和软件架构的深入剖析,使得这本书的实用价值对我来说打了折扣。我希望看到的,是更贴近工业界和前沿研究的实例,比如如何使用ROS(机器人操作系统)进行模块化开发,或者深度学习在路径规划中的最新突破。如果它能提供一个完整的软件栈设计蓝图,而不是仅仅停留在硬件选型的层面,那会是更有价值的参考。
评分 评分 评分 评分 评分相关图书


















本站所有内容均为互联网搜索引擎提供的公开搜索信息,本站不存储任何数据与内容,任何内容与数据均与本站无关,如有需要请联系相关搜索引擎包括但不限于百度,google,bing,sogou 等
© 2026 book.quotespace.org All Rights Reserved. 小美书屋 版权所有